
An active semi-supervised transfer learning method for robot pose error prediction and compensation
Published in November 11, 2023
Contribution
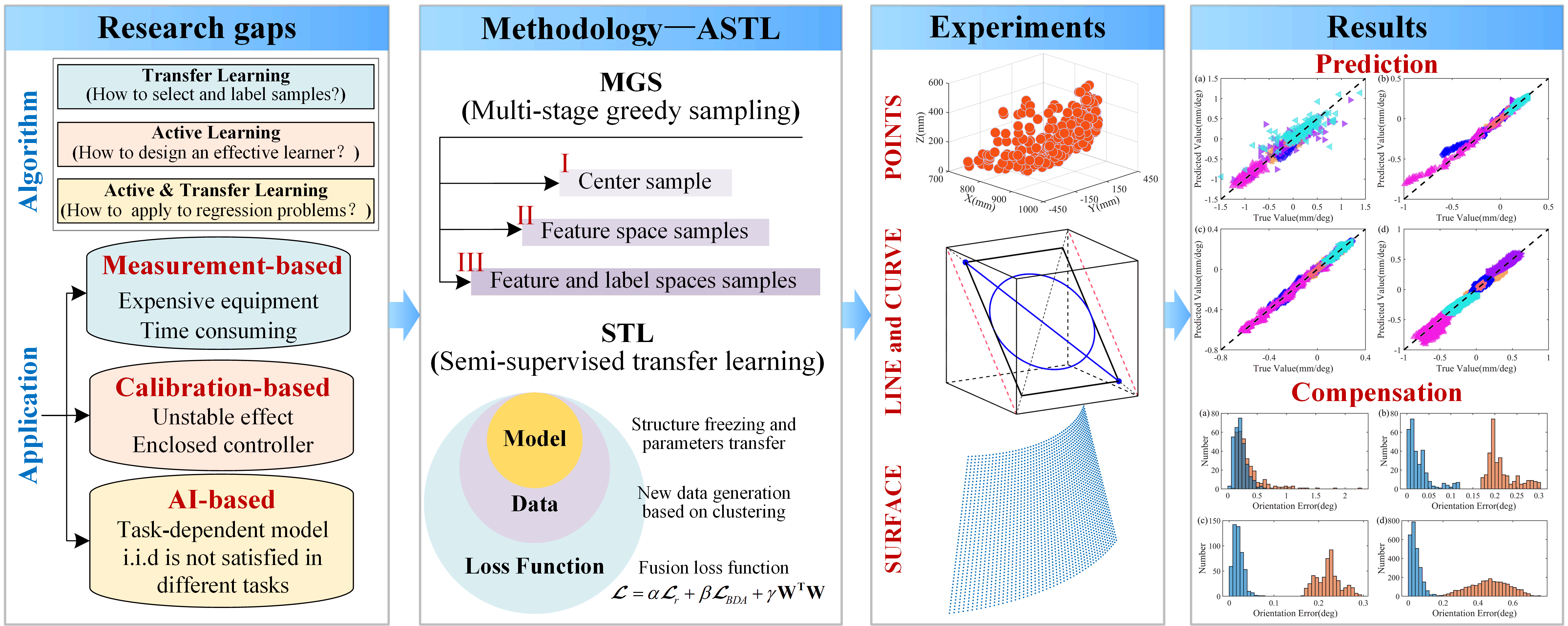
Aiming at the limited efficiency and accuracy of existing robot position error prediction methods, by combining limited sample labelling and high-precision error prediction, an active semi-supervised transfer learning (ASTL) method is proposed in this paper. Based on a detailed experimental comparison and analysis, the conclusions of this study are as follows:
- The robot pose error prediction problem is defined as a transfer learning paradigm for the first time. The simulation domain based on coarse calibration and the measurement domain based on measurements were examined simultaneously. Knowledge is transferred and shared between the two domains.
- Multi-stage greedy sampling (MGS) is proposed to achieve informed sample selection and labelling, which significantly reduces the labelling cost while improving the quality of the samples involved in model training. Semi-supervised transfer learning (STL) methods are designed to achieve knowledge transfer from the simulation domain to the measurement domain in terms of the model, data, and loss functions to ensure model accuracy.
- Four robot motion tasks are designed to validate the effects of the ASTL. Among the comparisons with other sample selection and transfer learning methods, ASTL exhibited the best performance. After using the ASTL, the average error prediction efficiency improved by approximately 89% and the maximum robot error reduction was approximately 90%.
The proposed ASTL method is efficient and accurate for robot pose error prediction and compensation, which significantly improves the usability of the algorithm in solving practical engineering problems, and can provide an effective prediction and compensation method for high-precision robotic application scenarios.
Graphic Abstracts
The graphic abstract is shown below
Recommended citation: T. Zhang, F. Peng, X. Tang, R. Yan, C. Zhang, R. Deng, An active semi-supervised transfer learning method for robot pose error prediction and compensation, Eng. Appl. Artif. Intell., 128 (2024) 107476, https://doi.org/10.1016/j.engappai.2023.107476. https://doi.org/10.1016/j.engappai.2023.107476